Trajectory investment problem¶
General description¶
Recall the annual investment problem in Xpansion :
$$ \min_{x \in \mathcal{X}} \quad C^T x + \text{ANTARES}(x) $$ over a set of investment variables specified by the user, where :
- \(x\) is the vector of the capacities installed for each candidate
- \(C\) contains the fixed cost annuities of those candidates
- \(\text{ANTARES}(x)\) is the operating cost of the system for a given investment level.
Switching to a pluriannual vision¶
We want to switch to a pluriannual vision and optimise the investments over several possible trajectories described on a diverging tree of scenarios
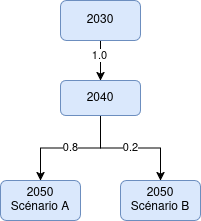
Figure 1 - Trajectory tree made up of annual Xpansion studies
The optimisation problem we now want to solve is, denoting by \(n \in \mathcal{T}\) a node in the tree:
- \(wIC_n\) contains the already weighted (for probability of the node) and discounted one-time payment investment costs per MW.
- \(wDC_n\) contains the already weighted (for probability of the node) and discounted one-time payment retirement costs per MW.
- \(wOC_n\) contains the already weighted (for represented duration of the node & probability) and discounted operation and maintenance fixed costs.
- \(w(n) = P(n) \times \sum_{y = y_n}^{y = y_n + d_n - 1} \frac{1}{(1+r)^{y - y_0}}\).
- \(P(n)\) is the probability of realisation of node \(n\) : \(P(n) = P_{\text{parent}(n)}(n) \times P(\text{parent}(n))\).
- \(P(root) = 1\).
On the \(dx^{+/-}\) variables¶
Note : In our model, \(x_{i,n}\) is the capacity available during the period represented by \(n\), and this means the decisions \(dx_{i,n}^{+/-}\) represent the variation of capacity during the period between \(\text{parent}(n)\) and \(n\) (i.e. the capacity being built or decommisionned during the period represented by \(\text{parent}(n)\), with effective entry into service at the beginning of \(n\)).
We can impose the decisions to be the same in all children of a given node (see trajectory constraints) if we want the investment decision of a given period to be independent of what scenario will materialize in the next period when the new capacities enter into service.
- In the example from Figure 1, this would mean that the capacity we install in the period [2040, 2050] is independent of wether
2050_Aor2050_Bwill be realised.